Vier Anwendungen von Industrierobotern und CNC-Werkzeugmaschinen
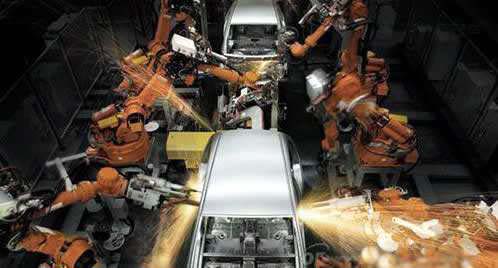
REVIEW: Die Automobilindustrie war in der Vergangenheit der wichtigste Bereich der Robotik-Anwendungen. Mit der Zunahme der Automatisierungsanforderungen wurden neben den traditionellen Schweißanwendungen auch industrielle Roboteranwendungen weiter ausgebaut. Roboter wurden auch weit verbreitet in den Bereichen Laden und Entladen von Maschinen, Materialhandhabung, Palettieren, Schleifen, Lackieren und Zusammenbau verwendet.
Umformmaschinen sind ein wichtiger Teil von Werkzeugmaschinen. Formgebung und Verarbeitung sind oft mit hoher Arbeitsintensität, Lärmbelästigung, Metallstaub usw. verbunden. Manchmal ist es in einer hohen Temperatur, hoher Feuchtigkeit oder sogar in einer verschmutzten Umgebung. Die Arbeit ist einfach und langweilig, und es ist schwierig für Unternehmen, Menschen einzustellen. Die Integration von Industrierobotern und Umformmaschinen löst nicht nur das Problem der Beschäftigung im Unternehmen, sondern verbessert auch die Effizienz und Sicherheit der Bearbeitung und verbessert die Bearbeitungsgenauigkeit. Es hat viel Raum für Entwicklung.

Umformmaschinen sind ein wichtiger Teil von Werkzeugmaschinen. Formgebung und Verarbeitung sind oft mit hoher Arbeitsintensität, Lärmbelästigung, Metallstaub usw. verbunden. Manchmal ist es in einer hohen Temperatur, hoher Feuchtigkeit oder sogar in einer verschmutzten Umgebung. Die Arbeit ist einfach und langweilig, und es ist schwierig für Unternehmen, Menschen einzustellen. Die Integration von Industrierobotern und Umformmaschinen löst nicht nur das Problem der Beschäftigung im Unternehmen, sondern verbessert auch die Effizienz und Sicherheit der Bearbeitung und verbessert die Bearbeitungsgenauigkeit. Es hat viel Raum für Entwicklung.
CNC-Biegemaschine und Roboter-integrierte Anwendung
Es gibt zwei Hauptwege, Roboterbiegemaschinen zu integrieren.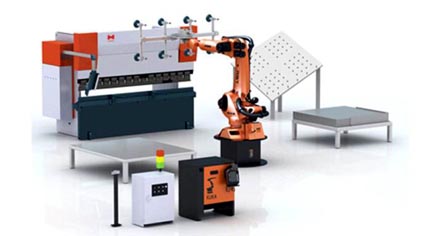
Eine ist die Biegemaschine als das Zentrum, die Roboterkonfiguration Vakuum-Saugnapf, magnetische Spannung Blatt Ladegestell, Positionierung Tisch, Schneidetisch, Flip-Frame Biegeeinheit bilden.
Die zweite ist die flexible Verarbeitungslinie, die von Robotern und Lasergeräten oder CNC-Rundtischstanzmaschinen, Industrieroboter-Laufwellen, Plattenmaterialübertragungslinien, Positioniertischen und Vakuumsaugnäpfen gebildet wird. Eston verwendet seine eigene Technologie und Plattform in der Robotersteuerung und der Werkzeugmaschinensteuerung, um eine nahtlose Verbindung zu realisieren, Biegesoftwarepakete zu entwickeln und eine Closed-Loop-Steuerung der Roboterzuführung während des Biegens zu implementieren. Bei verschiedenen Biegegeschwindigkeiten führt der Roboter eine vollständige Verfolgung der automatischen Anpassung durch. Das Biegesoftwarepaket verkürzt außerdem die Biege-Lernzeit von 2-3 Tagen auf 2-3 Stunden. Im Schaltschrank werden Aktenschränke, Aufzüge, Sicherheitstüren und andere Verarbeitungen gut eingesetzt.
 Stanzpressen und Roboterintegration
Stanzpressen und Roboterintegration
Es gibt zwei Hauptmethoden für die Integration von Roboter- und Stanzpressen.
Die erste ist das Stanzen und Be- und Entladen eines einzelnen Roboters: Das Blech wird vom Roboter vom Demontageblech zum Positioniertisch transportiert und dann zum Pressen in die Pressform übergeben. Nach dem Stanzen nimmt der Roboter das Material und legt es in den Stapeltisch, so dass ein einzelner Pressroboter automatisch be- und entladen kann.
Die zweite ist die Roboterstanzverbindung: Durch mehrere Roboter wird eine Stanzverbindung zwischen mehreren Pressen hergestellt. Je nach den Anforderungen des Umformprozesses des Werkstücks müssen mehrere Pressen bearbeitet werden. Die gesamte Produktionslinie besteht aus einem Abbruchroboter, einem Fütterungsroboter, einem Transferroboter zwischen den Pressen und einem Hecklinienroboter. Im Vergleich zu Robotern mit linearen Koordinaten ist der Einsatz von Industrierobotern flexibler, es gibt keinen Konturbedarf für das Werkzeug und es ist einfach zu integrieren. Eston nutzt nahtlos das autonome Pressensteuersystem und das Robotersteuerungssystem, um Roboterbewegungen und Pressen optimal zu koordinieren. Der Einsatz von Feldbus maximiert die Effizienz der gesamten Produktionslinie und erhöht die Sicherheit.
 Hot-Die-Forging- und Roboter-integrierte Anwendungen
Hot-Die-Forging- und Roboter-integrierte Anwendungen
Warmschmiede-Produktionslinien bestehen normalerweise aus zwei Gesenkschmiedepressen, eine zum Stanzen und die andere zum Beschneiden. Die integrierte Hot-Die-Schmiede-Roboter-Anwendung konfiguriert üblicherweise zwei Roboter, von denen einer für den Transfer des von dem Zwischenfrequenzofen bearbeiteten Hochtemperaturmaterials zur Pressform-Gesenkschmiedepresse zuständig ist und der andere für die Entnahme des Materials aus dem Pressformwerkzeug zuständig ist Schmiedepresse und Transfer zu einem anderen Werkzeug. Schmiedeautomat zum Trimmen. Um zu verhindern, dass Hochtemperatur-Stanzteile an der Form anhaften, ist es notwendig, die Form nach jedem Stempeln zu schmieren. Die Schmierung kann von Robotern oder von speziellen Agenturen vorgenommen werden. Aufgrund der hohen Temperatur und Feuchtigkeit und der rauen Umgebung, die durch die Graphitschmierung verursacht wird, sollte dem Schutz des Roboters und der Widerstandsfähigkeit des Roboters gegen Wärmestrahlung besondere Aufmerksamkeit geschenkt werden. Estons Roboter hat einen 4-5-6-Achsen-Motor an den Arm- und Armgelenken des Roboters. Es hat die für sich charakteristische Struktur - weit entfernt von Wärmestrahlung. Das elektronische Nockensteuerungssystem ist in der Schmiedepresse installiert, um den Betrieb der Schmiedepresse und den Betrieb des Roboters zu koordinieren, um die Bearbeitungseffizienz zu verbessern und die Sicherheit des Systems zu erhöhen.
Schweißroboter-Anwendung
Schweißen ist der Prozess nach der Bearbeitung der Werkzeugmaschine. Es gibt zwei Arten von Roboterschweißen: Widerstandsschweißen und Lichtbogenschweißen.
Schweißroboteranwendungen machen mehr als 40% der Roboter aus. Die Lichtbogenschweißanwendung basiert auf dem Roboter, der Konfigurationsschweißmaschine, dem Drahtvorschubgerät, der Schweißpistole, den Vorrichtungen und anderen Komponenten, die aus Schweißarbeitsplätzen bestehen. Eston bietet Arbeitsroboter-Arbeitsstationen mit 6 kg dediziertem Lichtbogen mit Armlängen von 1400, 1600 und 2000 mm an.
Die Widerstandsschweißanwendung basiert auf dem Roboter als Kern, der Konfigurationspunktschweißpistole, der Schweißsteuerung, der Wasser- und Gaseinheit, dem Pipeline-Paket, den Vorrichtungen und anderen Komponenten, die aus Schweißarbeitsplätzen bestehen. Eston bietet eine 220 kg schwere Spezial-Schweißroboter-Workstation mit einer Armlänge von 2600 mm an. Darüber hinaus entwickelt Estonia Automation ein spezielles Schweißsoftware-Paket für Schweißanwendungen und integriert eine Prozessparameter-Bibliothek für Schweißfachkräfte in ein Robotersystem, um verschiedene Arten von Anforderungen zu erfüllen.

Es gibt zwei Hauptwege, Roboterbiegemaschinen zu integrieren.
Eine ist die Biegemaschine als das Zentrum, die Roboterkonfiguration Vakuum-Saugnapf, magnetische Spannung Blatt Ladegestell, Positionierung Tisch, Schneidetisch, Flip-Frame Biegeeinheit bilden.
Die zweite ist die flexible Verarbeitungslinie, die von Robotern und Lasergeräten oder CNC-Rundtischstanzmaschinen, Industrieroboter-Laufwellen, Plattenmaterialübertragungslinien, Positioniertischen und Vakuumsaugnäpfen gebildet wird. Eston verwendet seine eigene Technologie und Plattform in der Robotersteuerung und der Werkzeugmaschinensteuerung, um eine nahtlose Verbindung zu realisieren, Biegesoftwarepakete zu entwickeln und eine Closed-Loop-Steuerung der Roboterzuführung während des Biegens zu implementieren. Bei verschiedenen Biegegeschwindigkeiten führt der Roboter eine vollständige Verfolgung der automatischen Anpassung durch. Das Biegesoftwarepaket verkürzt außerdem die Biege-Lernzeit von 2-3 Tagen auf 2-3 Stunden. Im Schaltschrank werden Aktenschränke, Aufzüge, Sicherheitstüren und andere Verarbeitungen gut eingesetzt.
Es gibt zwei Hauptmethoden für die Integration von Roboter- und Stanzpressen.
Die erste ist das Stanzen und Be- und Entladen eines einzelnen Roboters: Das Blech wird vom Roboter vom Demontageblech zum Positioniertisch transportiert und dann zum Pressen in die Pressform übergeben. Nach dem Stanzen nimmt der Roboter das Material und legt es in den Stapeltisch, so dass ein einzelner Pressroboter automatisch be- und entladen kann.
Die zweite ist die Roboterstanzverbindung: Durch mehrere Roboter wird eine Stanzverbindung zwischen mehreren Pressen hergestellt. Je nach den Anforderungen des Umformprozesses des Werkstücks müssen mehrere Pressen bearbeitet werden. Die gesamte Produktionslinie besteht aus einem Abbruchroboter, einem Fütterungsroboter, einem Transferroboter zwischen den Pressen und einem Hecklinienroboter. Im Vergleich zu Robotern mit linearen Koordinaten ist der Einsatz von Industrierobotern flexibler, es gibt keinen Konturbedarf für das Werkzeug und es ist einfach zu integrieren. Eston nutzt nahtlos das autonome Pressensteuersystem und das Robotersteuerungssystem, um Roboterbewegungen und Pressen optimal zu koordinieren. Der Einsatz von Feldbus maximiert die Effizienz der gesamten Produktionslinie und erhöht die Sicherheit.
Warmschmiede-Produktionslinien bestehen normalerweise aus zwei Gesenkschmiedepressen, eine zum Stanzen und die andere zum Beschneiden. Die integrierte Hot-Die-Schmiede-Roboter-Anwendung konfiguriert üblicherweise zwei Roboter, von denen einer für den Transfer des von dem Zwischenfrequenzofen bearbeiteten Hochtemperaturmaterials zur Pressform-Gesenkschmiedepresse zuständig ist und der andere für die Entnahme des Materials aus dem Pressformwerkzeug zuständig ist Schmiedepresse und Transfer zu einem anderen Werkzeug. Schmiedeautomat zum Trimmen. Um zu verhindern, dass Hochtemperatur-Stanzteile an der Form anhaften, ist es notwendig, die Form nach jedem Stempeln zu schmieren. Die Schmierung kann von Robotern oder von speziellen Agenturen vorgenommen werden. Aufgrund der hohen Temperatur und Feuchtigkeit und der rauen Umgebung, die durch die Graphitschmierung verursacht wird, sollte dem Schutz des Roboters und der Widerstandsfähigkeit des Roboters gegen Wärmestrahlung besondere Aufmerksamkeit geschenkt werden. Estons Roboter hat einen 4-5-6-Achsen-Motor an den Arm- und Armgelenken des Roboters. Es hat die für sich charakteristische Struktur - weit entfernt von Wärmestrahlung. Das elektronische Nockensteuerungssystem ist in der Schmiedepresse installiert, um den Betrieb der Schmiedepresse und den Betrieb des Roboters zu koordinieren, um die Bearbeitungseffizienz zu verbessern und die Sicherheit des Systems zu erhöhen.
Schweißroboter-Anwendung
Schweißen ist der Prozess nach der Bearbeitung der Werkzeugmaschine. Es gibt zwei Arten von Roboterschweißen: Widerstandsschweißen und Lichtbogenschweißen.
Schweißroboteranwendungen machen mehr als 40% der Roboter aus. Die Lichtbogenschweißanwendung basiert auf dem Roboter, der Konfigurationsschweißmaschine, dem Drahtvorschubgerät, der Schweißpistole, den Vorrichtungen und anderen Komponenten, die aus Schweißarbeitsplätzen bestehen. Eston bietet Arbeitsroboter-Arbeitsstationen mit 6 kg dediziertem Lichtbogen mit Armlängen von 1400, 1600 und 2000 mm an.
Die Widerstandsschweißanwendung basiert auf dem Roboter als Kern, der Konfigurationspunktschweißpistole, der Schweißsteuerung, der Wasser- und Gaseinheit, dem Pipeline-Paket, den Vorrichtungen und anderen Komponenten, die aus Schweißarbeitsplätzen bestehen. Eston bietet eine 220 kg schwere Spezial-Schweißroboter-Workstation mit einer Armlänge von 2600 mm an. Darüber hinaus entwickelt Estonia Automation ein spezielles Schweißsoftware-Paket für Schweißanwendungen und integriert eine Prozessparameter-Bibliothek für Schweißfachkräfte in ein Robotersystem, um verschiedene Arten von Anforderungen zu erfüllen.




