Caso de Aplicacion de Robot Industrial y Mecanizado CNC
Este artículo analiza el proceso de aplicación del robot FANUC en la línea de producción de la carcasa del motor. Usando la tecnología de carga y descarga automática del robot y el uso del sistema de visión iRVision, la trayectoria del robot se puede planificar racionalmente y la tecnología de manipulación del robot industrial y la tecnología de mecanizado CNC se pueden combinar orgánicamente. Carga y descarga automática de piezas de trabajo, apilamiento automático de productos terminados y procesamiento de productos de alta precisión, alta eficiencia y bajo costo.
Palabras clave: robots industriales, cartera de mecanizado CNC, automatización industrial
1. Robot FANUC
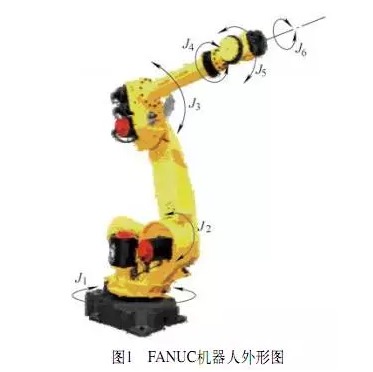
La línea de procesamiento automático está equipada con dos robots de sistema de manipulación FANUC Robot M-20iA. Uno de los robots es un robot caminando R1. Utilizando el control de motor FANUC αiF12 / 3000, la transmisión a través del reductor de precisión, engranaje y cremallera, alta repetibilidad, se puede adaptar fácilmente a la disposición de la máquina en ambos lados del riel.
Se utiliza principalmente para el agarre de piezas de trabajo en bruto, la carga de máquinas herramientas y el agarre de piezas de trabajo entre procesos de mecanizado, así como la eliminación de productos procesados y su transporte a cintas transportadoras. Otro robot fijo R2 incorpora la tecnología de robot inteligente exclusiva de FANUC (función de visión iRVision) para blanquear y apilar productos terminados en cestas. Cada unión de cada parte del robot FANUC Robot M-20iA es un punto de unión o sistema de coordenadas. La forma y posición de cada articulación se muestran en la Figura 1.
Diseño del equipo de línea de procesamiento
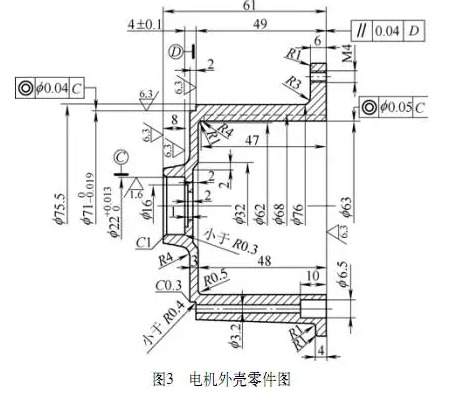
Figura 3. Dibujo de piezas de la carcasa del motor
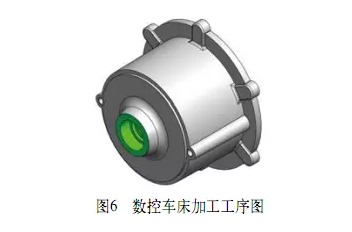
3) El torno de control numérico CLX360 realiza el orificio interior, el orificio de paso y el proceso de achaflanado del orificio, como se muestra en la Fig.6.

3.Una vez finalizado el centro de mecanizado 1, la pinza compuesta del robot para caminar R1 quita la pieza de trabajo, camina hacia la posición del centro de mecanizado 2 e instala la pieza de trabajo en el accesorio especial del centro de mecanizado 2. Como se muestra en la Figura 8.

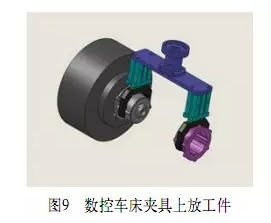
4. Después de que el centro de procesamiento 2 haya finalizado, el robot para caminar R1 lleva la pieza de trabajo a la posición del torno CNC y monta la pieza de trabajo en el accesorio especial. Como se muestra en la Figura 9.
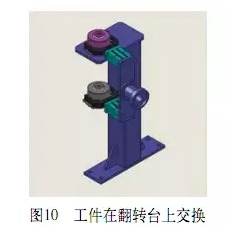
Después de mecanizar la pieza de trabajo, se retira la pieza de trabajo y el robot camina hacia la posición de la mesa giratoria de la pieza de trabajo para realizar la retroflexión e intercambio de la pieza de trabajo. Como se muestra en la Figura 10.
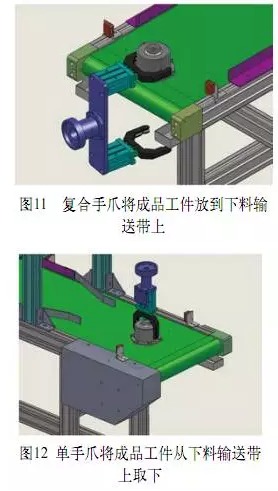
5. Después de intercambiar la pieza de trabajo en la mesa giratoria, el robot R1 coloca el producto terminado en el transportador de supresión. Como se muestra en la Figura 11.
La pieza de trabajo es descargada por el robot R2 y se coloca automáticamente en la canasta de producto final. Como se muestra en la Figura 12.
(2) Centro especial de mecanizado vertical 2 accesorio especial:
Centro de mecanizado vertical 2, para perforar orificios pasantes de 6 φ5.5mm, proceso de achaflanado de orificios, diseñado para sujetar la pieza de trabajo con un portabrocas neumático autocentrante de tres mordazas, con dos elementos elásticos orientados en bloque en V. Como se muestra en la Figura 14.
6. Robot, PLC y interfaz de máquina CNC
Para garantizar la cooperación segura entre el robot y la máquina herramienta CNC, se debe establecer una conexión de comunicación segura y confiable entre el robot, el PLC y la máquina herramienta CNC.
En términos de hardware, los puntos de entrada y salida correspondientes entre los tres están conectados a través de cables blindados.
En términos de software, el estado actual de las máquinas herramienta y robots se recopila a través de un software especial para robots e interfaces de PLC, y los correspondientes programas de control que se ajustan a la lógica de carga y descarga están programados para lograr una comunicación efectiva entre máquinas herramienta CNC y robots.
Es necesario enfatizar las señales de parada de emergencia, la señal de preparación de máquina CNC, la señal neumática de la pinza de robot, las señales de abrazadera suelta y las señales de puerta de seguridad de las máquinas herramienta CNC, etc. La pantalla de supervisión del estado de la máquina CNC se muestra en la Figura 16.
7. Conclusión
Con el desarrollo de robots industriales a una dirección más profunda y más amplia y la mejora del nivel de robots inteligentes, el alcance de la aplicación de robots continúa expandiéndose. Mecanismo automático de carga y descarga de robot industrial como componente auxiliar de máquinas herramienta CNC, cada vez más atención por parte de fabricantes y usuarios de máquinas herramienta.
La comunicación rápida y sin errores entre el sistema de control del robot y el sistema de control de la máquina, así como la precisión del movimiento del robot, garantizan la fiabilidad del proceso de mecanizado del sistema. La línea de producción de procesamiento automático descrita en este artículo reúne tecnologías avanzadas tales como tecnología de robots, tecnología PLC, tecnología de detección de sensores, tecnología de comunicación y tecnología de control numérico. Se realizó la combinación técnica de robots industriales y máquinas herramienta CNC, se simplificó el modo de operación de las máquinas herramienta CNC, se mejoró la seguridad operativa de las máquinas herramienta CNC y se redujo la intensidad de mano de obra de los trabajadores. La carga y descarga de la pieza de trabajo y el procesamiento automático están estrechamente conectados, lo que mejora en gran medida la eficacia del trabajo y tiene un buen valor de aplicación.
Palabras clave: robots industriales, cartera de mecanizado CNC, automatización industrial
1. Robot FANUC
La línea de procesamiento automático está equipada con dos robots de sistema de manipulación FANUC Robot M-20iA. Uno de los robots es un robot caminando R1. Utilizando el control de motor FANUC αiF12 / 3000, la transmisión a través del reductor de precisión, engranaje y cremallera, alta repetibilidad, se puede adaptar fácilmente a la disposición de la máquina en ambos lados del riel.
Se utiliza principalmente para el agarre de piezas de trabajo en bruto, la carga de máquinas herramientas y el agarre de piezas de trabajo entre procesos de mecanizado, así como la eliminación de productos procesados y su transporte a cintas transportadoras. Otro robot fijo R2 incorpora la tecnología de robot inteligente exclusiva de FANUC (función de visión iRVision) para blanquear y apilar productos terminados en cestas. Cada unión de cada parte del robot FANUC Robot M-20iA es un punto de unión o sistema de coordenadas. La forma y posición de cada articulación se muestran en la Figura 1.
2. Diseño de equipo de línea de producción de procesamiento automático
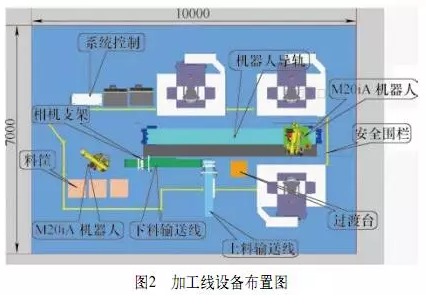
La línea de procesamiento automático de la carcasa del motor consiste en un transportador de alimentación y una cinta transportadora ciega (respectivamente equipados con sistema de visión iVision), Robot andante R1 (tipo de riel), robot fijo R2, dos centros de mecanizado vertical VM850, un torno CLX360 CNC, cesta acabada , y gabinete de control del sistema, etc. El diseño del equipo se muestra en la Figura 2.
La línea de procesamiento automático de la carcasa del motor consiste en un transportador de alimentación y una cinta transportadora ciega (respectivamente equipados con sistema de visión iVision), Robot andante R1 (tipo de riel), robot fijo R2, dos centros de mecanizado vertical VM850, un torno CLX360 CNC, cesta acabada , y gabinete de control del sistema, etc. El diseño del equipo se muestra en la Figura 2.
Diseño del equipo de línea de procesamiento
3. Proceso de mecanizado CNC
La pieza de trabajo es la carcasa del motor, como se muestra en la Figura 3, para la producción en masa, el material es de aleación de aluminio ADC12. El contenido de mecanizado incluye fresado frontal, roscado y roscado.
La pieza de trabajo es la carcasa del motor, como se muestra en la Figura 3, para la producción en masa, el material es de aleación de aluminio ADC12. El contenido de mecanizado incluye fresado frontal, roscado y roscado.
Figura 3. Dibujo de piezas de la carcasa del motor
El contenido de las operaciones de procesamiento de parte se asigna de la siguiente manera:
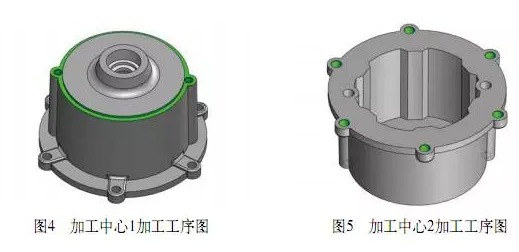
(1) Centro de mecanizado vertical VM850 1, taladrado con orificio inferior roscado M4, roscado de rosca M4 y fresado fuera del proceso del resalte cilíndrico, como se muestra en la Figura 4.
(2) Centro de mecanizado VM850 2, 6 φ5.5mm para taladrar orificios pasantes, paso de achaflanado de las aberturas, como se muestra en la Figura 5.
(1) Centro de mecanizado vertical VM850 1, taladrado con orificio inferior roscado M4, roscado de rosca M4 y fresado fuera del proceso del resalte cilíndrico, como se muestra en la Figura 4.
(2) Centro de mecanizado VM850 2, 6 φ5.5mm para taladrar orificios pasantes, paso de achaflanado de las aberturas, como se muestra en la Figura 5.
3) El torno de control numérico CLX360 realiza el orificio interior, el orificio de paso y el proceso de achaflanado del orificio, como se muestra en la Fig.6.
Además, también es necesario diseñar un accesorio especial. El accesorio del centro de mecanizado adopta el método interno de sujeción, y el torno CNC adopta el método de sujeción externa. La tecnología de aplicación combinada de robots y máquinas herramienta controladas numéricamente se utiliza para procesar las piezas de trabajo mediante carga y descarga automáticas para mejorar la eficiencia del procesamiento.
4. Robot de carga automática y diseño de acción de descarga
De acuerdo con las características de forma de las piezas de agarre neumático del robot de diseño de piezas de trabajo, incluidos los componentes neumáticos, sensores y piezas mecánicas.
El proceso de procesamiento de la pieza es el siguiente:
1. Las piezas de trabajo en blanco se colocan en un transportador de alimentación.
2. La pinza compuesta R1 del robot andante agarra la pieza de trabajo áspera, se desplaza a la posición 1 del centro de mecanizado e instala la pieza de trabajo en el accesorio especial del centro de mecanizado 1. Como se muestra en la Figura 7.
4. Robot de carga automática y diseño de acción de descarga
De acuerdo con las características de forma de las piezas de agarre neumático del robot de diseño de piezas de trabajo, incluidos los componentes neumáticos, sensores y piezas mecánicas.
El proceso de procesamiento de la pieza es el siguiente:
1. Las piezas de trabajo en blanco se colocan en un transportador de alimentación.
2. La pinza compuesta R1 del robot andante agarra la pieza de trabajo áspera, se desplaza a la posición 1 del centro de mecanizado e instala la pieza de trabajo en el accesorio especial del centro de mecanizado 1. Como se muestra en la Figura 7.
3.Una vez finalizado el centro de mecanizado 1, la pinza compuesta del robot para caminar R1 quita la pieza de trabajo, camina hacia la posición del centro de mecanizado 2 e instala la pieza de trabajo en el accesorio especial del centro de mecanizado 2. Como se muestra en la Figura 8.
4. Después de que el centro de procesamiento 2 haya finalizado, el robot para caminar R1 lleva la pieza de trabajo a la posición del torno CNC y monta la pieza de trabajo en el accesorio especial. Como se muestra en la Figura 9.
Después de mecanizar la pieza de trabajo, se retira la pieza de trabajo y el robot camina hacia la posición de la mesa giratoria de la pieza de trabajo para realizar la retroflexión e intercambio de la pieza de trabajo. Como se muestra en la Figura 10.
5. Después de intercambiar la pieza de trabajo en la mesa giratoria, el robot R1 coloca el producto terminado en el transportador de supresión. Como se muestra en la Figura 11.
La pieza de trabajo es descargada por el robot R2 y se coloca automáticamente en la canasta de producto final. Como se muestra en la Figura 12.
Esto concluye un proceso completo. Cada paso de procesamiento tiene un ritmo correspondiente. Después de ajustar el programa de mecanizado CNC y el programa de movimiento del robot, puede realizar la combinación perfecta de procesamiento de máquina herramienta CNC y carga y descarga de robots.
5. Diseño especial del accesorio
De acuerdo con las tareas de procesamiento respectivas de las tres máquinas herramienta CNC, tres juegos de abrazaderas neumáticas combinadas se diseñan e introducen de la siguiente manera.
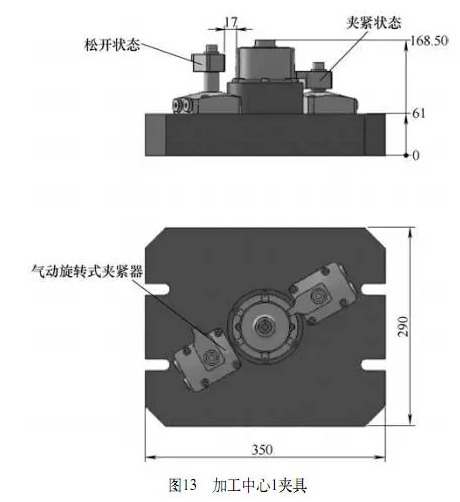
(1) Centro de mecanizado vertical 1 accesorio especial:
Vertical Machining Center 1 para taladrar, roscar y fresar protuberancias externas. Diseñar un accesorio con dos lados de un pasador para colocar la pieza de trabajo y sujetarla con una abrazadera rotativa neumática. Como se muestra en la Figura 13.
5. Diseño especial del accesorio
De acuerdo con las tareas de procesamiento respectivas de las tres máquinas herramienta CNC, tres juegos de abrazaderas neumáticas combinadas se diseñan e introducen de la siguiente manera.
(1) Centro de mecanizado vertical 1 accesorio especial:
Vertical Machining Center 1 para taladrar, roscar y fresar protuberancias externas. Diseñar un accesorio con dos lados de un pasador para colocar la pieza de trabajo y sujetarla con una abrazadera rotativa neumática. Como se muestra en la Figura 13.
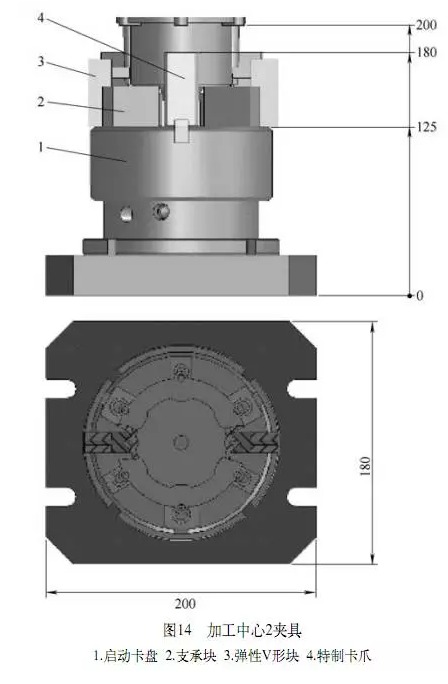
(2) Centro especial de mecanizado vertical 2 accesorio especial:
Centro de mecanizado vertical 2, para perforar orificios pasantes de 6 φ5.5mm, proceso de achaflanado de orificios, diseñado para sujetar la pieza de trabajo con un portabrocas neumático autocentrante de tres mordazas, con dos elementos elásticos orientados en bloque en V. Como se muestra en la Figura 14.
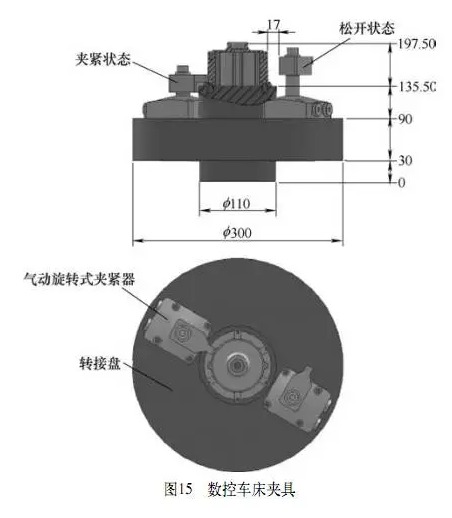
(3) accesorio especial del torno del CNC:
El torno de control numérico lleva a cabo el procesamiento del orificio interior, el orificio de paso y el proceso de achaflanado del orificio, y diseña un accesorio con una pieza de trabajo de posicionamiento de dos clavijas y un método de sujeción de abrazadera rotatoria neumática. Como se muestra en la Figura 15.
El torno de control numérico lleva a cabo el procesamiento del orificio interior, el orificio de paso y el proceso de achaflanado del orificio, y diseña un accesorio con una pieza de trabajo de posicionamiento de dos clavijas y un método de sujeción de abrazadera rotatoria neumática. Como se muestra en la Figura 15.
6. Robot, PLC y interfaz de máquina CNC
Para garantizar la cooperación segura entre el robot y la máquina herramienta CNC, se debe establecer una conexión de comunicación segura y confiable entre el robot, el PLC y la máquina herramienta CNC.
En términos de hardware, los puntos de entrada y salida correspondientes entre los tres están conectados a través de cables blindados.
En términos de software, el estado actual de las máquinas herramienta y robots se recopila a través de un software especial para robots e interfaces de PLC, y los correspondientes programas de control que se ajustan a la lógica de carga y descarga están programados para lograr una comunicación efectiva entre máquinas herramienta CNC y robots.
Es necesario enfatizar las señales de parada de emergencia, la señal de preparación de máquina CNC, la señal neumática de la pinza de robot, las señales de abrazadera suelta y las señales de puerta de seguridad de las máquinas herramienta CNC, etc. La pantalla de supervisión del estado de la máquina CNC se muestra en la Figura 16.
7. Conclusión
Con el desarrollo de robots industriales a una dirección más profunda y más amplia y la mejora del nivel de robots inteligentes, el alcance de la aplicación de robots continúa expandiéndose. Mecanismo automático de carga y descarga de robot industrial como componente auxiliar de máquinas herramienta CNC, cada vez más atención por parte de fabricantes y usuarios de máquinas herramienta.
La comunicación rápida y sin errores entre el sistema de control del robot y el sistema de control de la máquina, así como la precisión del movimiento del robot, garantizan la fiabilidad del proceso de mecanizado del sistema. La línea de producción de procesamiento automático descrita en este artículo reúne tecnologías avanzadas tales como tecnología de robots, tecnología PLC, tecnología de detección de sensores, tecnología de comunicación y tecnología de control numérico. Se realizó la combinación técnica de robots industriales y máquinas herramienta CNC, se simplificó el modo de operación de las máquinas herramienta CNC, se mejoró la seguridad operativa de las máquinas herramienta CNC y se redujo la intensidad de mano de obra de los trabajadores. La carga y descarga de la pieza de trabajo y el procesamiento automático están estrechamente conectados, lo que mejora en gran medida la eficacia del trabajo y tiene un buen valor de aplicación.




